Sponsored By
3D Printing
Formlabs' Form 4 3D printer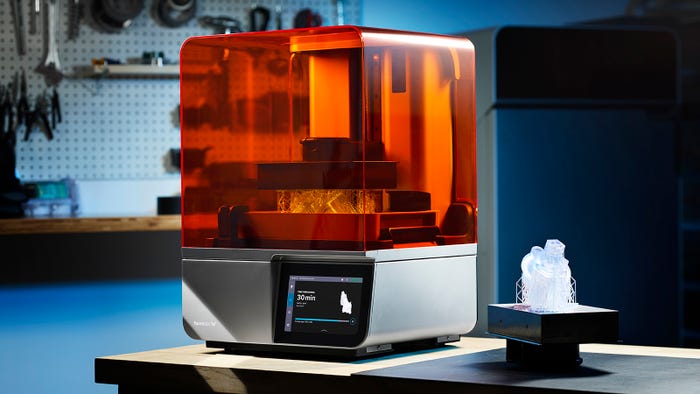
3D PrintingFormlabs Releases Fastest 3D Printer YetFormlabs Releases Fastest 3D Printer Yet
The Form 4 can achieve vertical print speeds of 100 mm per hour and outpace injection molding, according to the company.





















.svg?width=300&auto=webp&quality=80&disable=upscale)















Editor's Choice



Sign up for the PlasticsToday NewsFeed newsletter.